|
|
|
|
|
|

|
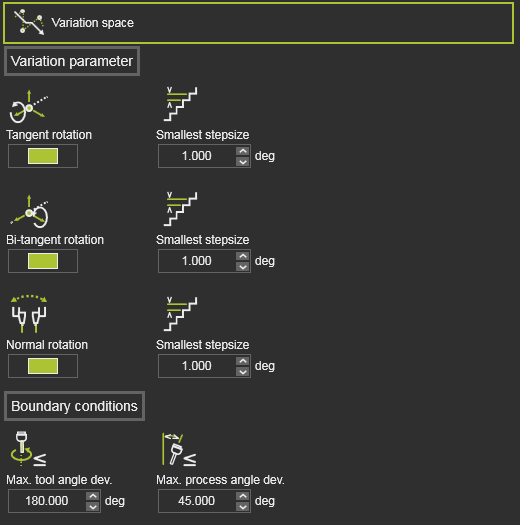
Tangent rotation
|
Varies the toolpath position while rotating it around its tangent direction.
|
 Step size Step size
Rotation value in each iteration step.
|
Switch to include it in the optimization process.
|
Expert
|

|
Bi-tangent rotation
|
Varies the toolpath position while rotating it around its bi-tangent direction.
|
Step size
Rotation value in each iteration step.
|
Switch to include it in the optimization process.
|
Expert
|

|
Singularity orientation
|
Evaluates singularity situations of the robot or machine.
In case of a robot scenario, the singularity orientation means the rotation of the toolpath position around its normal axis.
|
Step size
Rotation value in each iteration step.
Deviation cone
Axis with values within the specified cone angle are being optimized.
|
Switch to include it in the optimization process.
|
Expert
|

|
Normal rotation
(arc welding technology)
|
Varies the toolpath position while rotating it around its normal direction.
|
Step size
Rotation value in each iteration step.
|
Switch to include it in the optimization process.
|
Expert
|