Objectif
|
|
À ce niveau de base, le programme créé sera modifié et optimisé à certains endroits pour montrer comment cela peut être fait. Il est évident que ce paragraphe ne traite pas de tous les paramètres et fonctions disponibles.
|
|
|
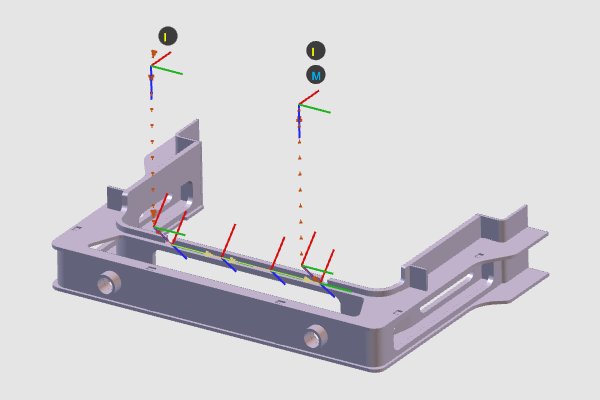
Grâce à la fenêtre programme actif et à la fonction d'apprentissage manuel, la trajectoire peut être modifiée. Les opérations avant et après le process seront modifiées. De même, les attributs qui sont appliqués pour générer la trajectoire à partir de la géométrie de process seront modifiés.
|
|
|
Étapes
|
|

|
Veillez à enregistrer fréquemment vos modifications.
|
|
|
1
|
Modifier les paramètres de calcul de la trajectoire
|
1.1
|

|
Les étapes suivantes sont réalisées dans la fenêtre Programme actif.
|
|
1.2
|

|
Changez les valeurs des décalages locaux.
|
|
1.3
|

|
Programmez un deuxième parcours.
|
|
1.4
|
|
Modifiez le mode d’approximation.
|
|
|
2
|
Changer les paramètres de mouvement du soudage
|
2.1
|

|
Changez la précision pour atteindre les différentes positions, c’est-à-dire la distance de survol.
|
|
2.2
|
|
Modifiez les angles de travail, d'avance et d’orientation de la torche de soudage.
|
|
|
3
|
Définir une approche et un retrait
|
3.1
|

|
Modifiez l’approche et le retrait.
|
|
|
4
|
Évènements et apprentissage
|
4.1
|

|
Sélectionnez l’environnement Évènements et Apprentissage.
|
4.2
|

|
Insérez un point process.
|
|
4.3
|

|
Supprimez ou suspendez un point process.
|
|
4.4
|

|
Les étapes suivantes sont réalisées dans la fenêtre Fenêtre d’apprentissage.
|
|
4.5
|
|
Utilisez la fenêtre d’apprentissage pour naviguer entre les points.
|
|
4.6
|
|
Réglez la configuration robot.
|
|
4.7
|

|
Supprimez la configuration robot apprise.
|
|
4.8
|

|
Définissez un nouvel état initial pour la simulation en utilisant une position prédéfinie du robot.
|
|
4.9
|

|
Insérez des points intermédiaires.
|
|
4.10
|

|
Simulez la mise à jour de la trajectoire. Ensuite, changez le type de mouvement de LIN à ART et simulez une nouvelle fois pour voir les différences.
|
|
4.11
|
|
Apprenez une position de point par des coordonnées cartésiennes.
|
|
4.12
|
|
Apprenez une position de point par des valeurs d’axes robot.
|
|
|
5
|
Groupe d’opérations
|
5.1
|
|
Les étapes suivantes sont réalisées dans la fenêtre Programme actif.
|
|
5.2
|
|
Supprimez un groupe d’opération.
|
|
|
6
|
Enregistrer le projet
|
|
6.1
|

|
Enregistrez le projet (.cenprj) avec un nom approprié.
|
|
|
|
